モーター保護用のサーキットブレーカー - 適切なものを選択するには?

短絡または過度に高い負荷による損傷から電気モーターを保護できるサーキットブレーカーを選択する場合、多くの場合、公称値の 5 ~ 7 倍の大量の始動電流を考慮する必要があります。リスケージローターを備えた非同期パワーユニットは、最も強力な始動過負荷にさらされます。この機器は工業用および家庭用の作業に広く使用されているため、デバイス自体と電源ケーブルの両方を保護するという問題は非常に重要です。この記事では、電気モーター保護サーキットブレーカーを正しく計算して選択する方法について説明します。
電気モーターを保護するためのデバイスのタスク
ネットワーク内の大きな突入電流から家庭用電化製品は、通常、電流が定格値を超えた後しばらくしてトリガーされる三相サーキット ブレーカーによって保護されます。したがって、モーターシャフトは、必要な回転速度まで回転する時間があります。その後、電子の流れの力は減少します。しかし、日常生活で使用される保護装置は微調整されていません。したがって、過負荷や短絡過電流から誘導電動機を保護できるサーキットブレーカの選択はより困難です。

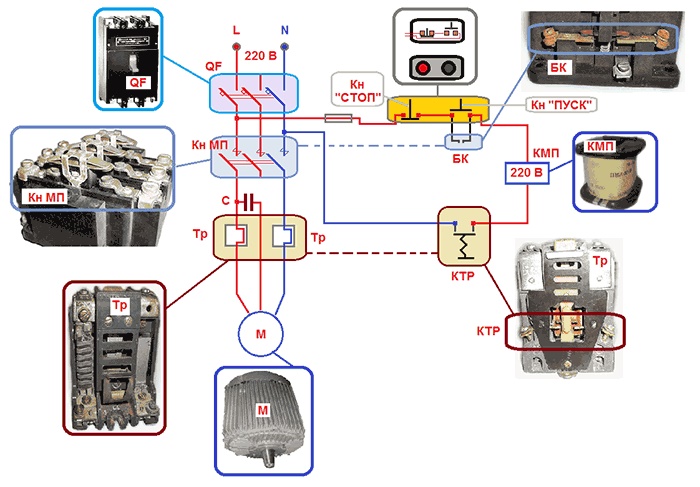
モーター保護用の最新のサーキットブレーカーは、多くの場合、スターター(モーターを始動するためのいわゆるスイッチングデバイス)を備えた共通のハウジングに取り付けられています。これらは、次のタスクを実行するように設計されています。
- モーター内部または電源回路で発生する過電流からデバイスを保護します。
- 電源ユニットを相導体の破損や相の不均衡から保護します。
- 過熱の結果として停止を余儀なくされたモーターが冷却するために必要な時間遅延を提供します。
ビデオのエンジンの制御と保護の自動化:
- 負荷がシャフトに供給されなくなった場合の設備のシャットダウン。
- 長時間の過負荷からパワーユニットを保護。
- 過熱に対する電気モーターの保護(この機能を実行するために、追加の温度センサーがユニットの内部または本体に取り付けられています)。
- 動作モードの表示、および緊急状態の通知。
モーター保護サーキットブレーカーは、監視および制御メカニズムと互換性がある必要があることにも留意する必要があります。
電気モーター用自動機の計算
最近まで、電気モーターを保護するために次の方式が使用されていました。サーマルレギュレーターがスターター内に設置され、コンタクターと直列に接続されていました。この仕組みはこんな感じでした。リレーに大電流が長時間流れると、リレーに取り付けられたバイメタルプレートが加熱され、それが曲がってコンタクタ回路が遮断されました。設定された負荷の超過が短期間であった場合(エンジンの始動時に発生するように)、プレートを加熱して機械をトリガーする時間がありませんでした。
ビデオのモーター保護サーキットブレーカーの内部構造:
このような方式の主な欠点は、電圧サージや位相の不均衡からユニットを保護できないことでした。現在、発電所の保護は、より正確で最新のデバイスによって提供されています。
電気設備用の保護回路ブレーカを選択するには、その時間 - 電流特性とカテゴリを知る必要があります。時間-電流特性は、AB が設計されている定格電流に依存しません。
モーターが起動するたびに回路ブレーカーがトリップするのを防ぐために、起動電流は、デバイスが瞬時にトリップする (カットオフする) 値よりも大きくしてはなりません。始動電流と定格の比率は機器のパスポートに規定されており、最大許容値は 7/1 です。
実際に機械を計算するときは、記号 K で示される安全率を使用する必要があります。n.デバイスの定格電流が 100A を超えない場合、K の値nは 1.4 です。大きな値の場合は 1.25 です。これに基づいて、カットオフ電流の値は式Iによって決定されますから ≧Kn ×私始める...計算されたパラメーターに従ってサーキットブレーカーを選択します。
機械が電気パネルまたは特別なキャビネットに取り付けられている場合、選択時に考慮しなければならないもう 1 つの値は、温度係数 (にt)。この値は 0.85 であり、サイジング時の保護装置の定格電流はそれを掛ける必要があります (In/にt).
パワーユニットの電気的保護のための最新のデバイス
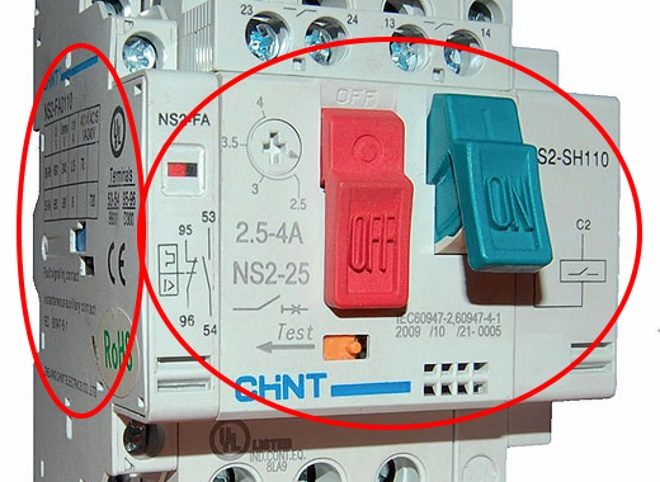
モジュラーモーター自動機は非常に人気があり、上記のすべての機能にうまく対処できるユニバーサルデバイスです。

さらに、シャットダウンパラメータを高精度で調整するために使用できます。
現代の電動自動機械は、外観、特性、および制御方法が互いに異なる、さまざまな種類で提供されています。従来のデバイスの選択と同様に、始動の値と定格電流を知る必要があります。さらに、保護装置が実行する機能を決定する必要があります。必要な計算を行ったら、自動モーターを購入できます。これらのデバイスの価格は、その機能と電気モーターの出力に直接依存します。
産業条件における電気モーターの保護の特徴
多くの場合、電力が 100 kW を超えるデバイスの電源を入れると、一般的なネットワークの電圧が最小値を下回ります。この場合、稼働中の電源ユニットのシャットダウンは発生しませんが、回転数は減少します。電圧が正常なレベルに戻ると、モーターが復活し始めます。さらに、その作業は過負荷モードで行われます。これをセルフスターティングと呼びます。
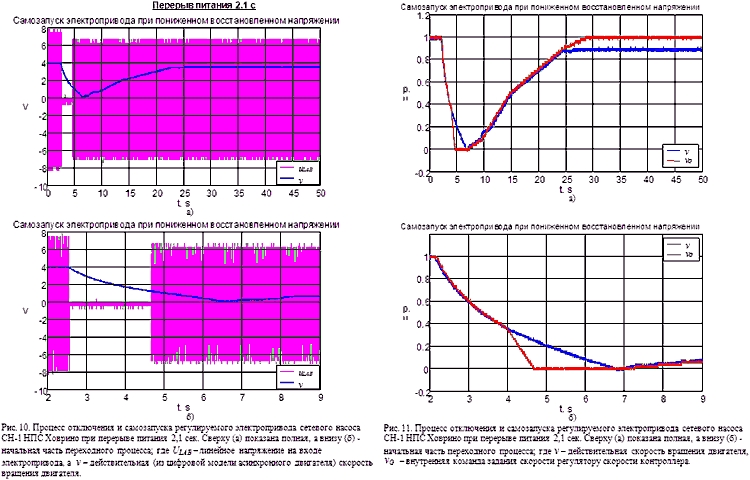
自己始動により、AB が誤動作することがあります。これは、一時的な電圧降下が発生する前に設備が長時間通常モードで動作していて、バイメタル プレートがウォームアップする時間があった場合に発生する可能性があります。この場合、電圧が正規化される前に熱リリースがトリップすることがあります。次のビデオの自動車の電気回路網における電圧降下の例:
自己始動中の強力な工場電気モーターのシャットダウンを防ぐために、電流トランスが共通ネットワークに含まれているリレー保護が使用されています。保護リレーは二次巻線に接続されています。これらのシステムは、複雑な計算を使用して選択されます。本番環境では、このタスクは通常の電力エンジニアによって実行されるため、ここではそれらを提供しません。
結論
この記事では、電気モーター用の保護装置のトピックについて詳しく説明し、電気モーター用の自動機械を選択する方法と、考慮すべきパラメーターについて説明しました。読者は、この場合に行われる計算がまったく難しくないことを確信できます。つまり、それほど強力ではない電源ユニットが含まれるネットワーク用のデバイスを選択することはかなり可能です。



